4000-189-000
- 登錄
- 注冊
-
APP下載

-
小程(cheng)序(xu)

-
免費發布
發布產品
發布方案
發布需求



- 首頁
-
產品庫
-
感知層
傳感器/生物識別
- 人臉識別
- 人臉識別芯片 攝像頭模組 解決方案 人臉識別終端
- 指紋識別
- 指紋芯片 指紋傳感器 指紋模塊 指紋方案 指紋終端
- 虹膜識別
- 虹膜芯片 虹膜模塊 虹膜識別終端 虹膜方案
- 靜脈識別
- 靜脈芯片 靜脈模塊 靜脈識別終端 靜脈方案
- 語音識別
- 語音芯片 語音模塊 語音終端 語音方案
- 其他識別算法
- 攝像機模組 解決方案 識別終端
- 圖像/視覺傳感
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 濕度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 溫度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 壓力傳感器
- 解決方案 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端
- PH傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 流量傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 位移傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 速度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 加速度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 位置傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 液位傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 轉速傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 力矩傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 粘度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 濃度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 能耗傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 磁力傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 陀螺儀
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- MEMS
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 超聲波傳雷達
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 撞擊傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 光纖傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 光電傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 光學傳感
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 聲學量傳感
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 生理傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 振動傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 氣體傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 水質傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 角度傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 毫米波雷達
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 電流變送器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 鋼絲繩探傷傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 稱重傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 測力傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 行人重識別
- 攝像機模組 解決方案 識別終端
- 光照傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 水浸傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 煙霧傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 激光雷達
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 其他傳感器
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
- 傳感器制造耗材
- 晶圓材料 封裝膠水
- IMU
- 傳感器芯片 敏感元件 傳感器模組/開發板 傳感器終端 解決方案
RFID/智能卡/條碼
- RFID標簽芯片
- 低頻標簽芯片 高頻標簽芯片 超高頻標簽芯片 有源RFID芯片 NFC標簽芯片
- RFID標簽
- 有源標簽 抗金屬標簽 耐腐蝕標簽 耐高溫標簽 易碎防轉移標簽 抗液體標簽 傳感器標簽 動物管理標簽 嵌入式標簽/Inlay 聲光定位標簽 柔性可打印抗金屬標簽 洗滌標簽 服裝吊牌/織嘜標簽 珠寶標簽 電子車牌 輪胎標簽 票卡標簽 扎帶標簽 鉛封標簽 PVC標簽 硅膠標簽 PCB標簽 PPS標簽 陶瓷標簽 印刷標簽 NFC標簽 EAS標簽 低溫標簽 ABS標簽 圖書標簽 腕帶標簽 地埋標簽 資產管理標簽 倉儲管理標簽 工業應用標簽 電力應用標簽 鐵路應用標簽 煙草應用標簽 機場行李標簽 其他標簽
- 固定式讀寫器
- 桌面式讀寫器 發卡機 一體機 通道式讀寫器 立式門禁讀寫器 掛式讀寫器
- 集成式讀寫終端
- 圖書自助借還終端 檔案柜 自動結算終端 工具管理柜/箱 餐飲自助收銀設備 耗材管理柜 通道機 智能移動盤點車 智能分揀機
- PDA/手持機
- RFID平板電腦 穿戴式讀寫器 藍牙讀寫器 手持終端 PDA
- 讀寫器天線
- 地毯天線 陶瓷天線 近場天線 線極化天線 圓極化天線 天線分支器
- 標簽天線
- 鋁蝕刻天線 銅蝕刻天線 銀漿印刷天線 鋁箔模切天線
- 標簽生產設備
- 標簽封裝設備 標簽復合設備 貼標機 噴碼機 標簽數據寫入設備 標簽打樣設備 臺式打印機 RFID打印機
- RFID輔助材料
- 吸波材料 標簽基材 標簽電池 導電膠
- 標簽檢測設備
- 標簽檢測設備
- 智能卡
- ID卡 IC卡 M1卡 CPU卡 SIM/USIM卡 條碼卡 屏蔽卡 金融可視卡
- 證卡設備
- 證卡打印機 打印耗材 制卡材料 生產設備
- 條碼設備
- 打印機 掃描設備 打印耗材 機身外殼 控制面板
- 讀寫器模塊
- 低頻模塊 高頻模塊 超高頻模塊 有源模塊 NFC讀寫器模組
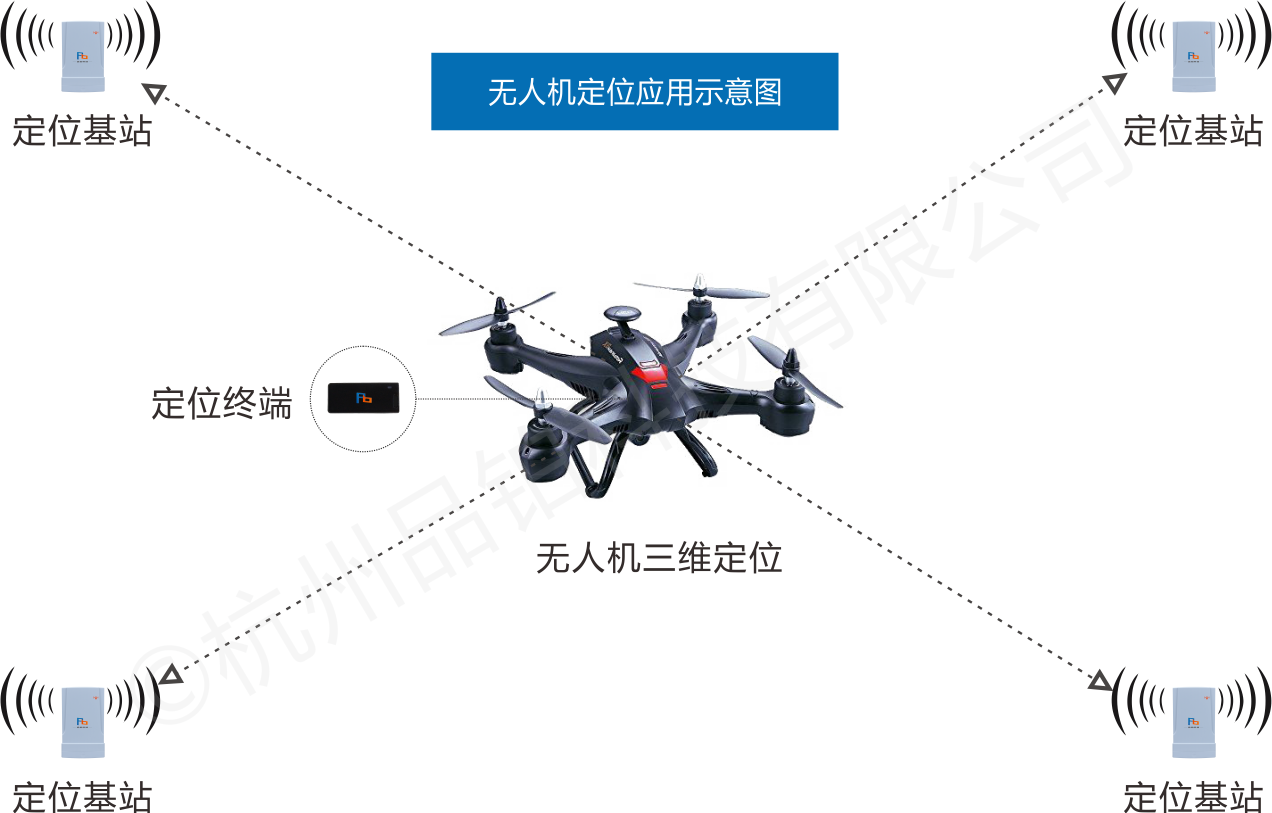
定位
- GPS定位及差分
- GPS芯片 GPS模組 軟硬件解決方案 GPS終端 GPS天線 差分定位芯片 差分定位模組 差分定位方案 差分定位終端 制圖/算法/平臺軟件
- 基站定位
- 基站定位芯片 定位模組 制圖/算法/平臺軟件 定位終端 軟硬件解決方案 基站/小基站
- UWB定位
- UWB芯片 UWB定位標簽 UWB定位模組 UWB測距模塊 UWB基站/信標 制圖/算法/平臺軟件 軟硬件解決方案 UWB天線
- WiFi定位
- WiFi芯片 WiFi模組 基站/信標 WiFi無線AP WiFi天線 硬件終端 制圖/算法/平臺軟件 軟硬件解決方案
- 藍牙RSSI
- 藍牙芯片 藍牙模塊 藍牙標簽 藍牙接收/發射器 基站/信標 藍牙網關 硬件終端 制圖/算法/平臺軟件 軟硬件解決方案
- ZigBee定位
- ZigBee芯片 ZigBee終端 ZigBee模塊 ZigBee基站/信標 制圖/算法/平臺軟件 軟硬件解決方案
- 其他定位方案
- RFID定位 紅外定位 定位芯片 定位模組 硬件終端 基站/信標 制圖/算法/平臺軟件 軟硬件解決方案
-
傳輸層
蜂窩/3G/4G/5G/NB-IoT
- 3G
- 3G芯片 3G模組 3G基站 3G行業解決方案 3G終端 3G天線
- 4G
- 4G芯片 4G模組 4G網關設備 4G終端 4G核心網產業供應商 4G整體方案 4G天線 4G運營商 4G小基站 4G通信服務商 終端設備
- 5G
- 5G芯片 5G模組 5G整體方案 5G核心網產業供應商 5G網關設備 5G路由 5G運營商 5G小基站 5G通信服務商 應用終端
- NB-IoT
- NB-IoT芯片 NB-IoT模組 NB-IoT整體方案 NB-IoT核心網供應商 NB-IOT網關設備 運營商 小基站 通信服務商 應用終端
- 物聯網卡
- 物聯網卡 應用終端 esim
- 4G-Cat.1
- 運營商 核心網產業供應商 小基站 通信服務商 Cat.1芯片 Cat.1模組 Cat.1網關設備 Cat.1整體方案類 應用終端
短距離/WiFi/藍牙/ZigBee
- WiFi
- WiFi芯片 WiFi模組 WiFi網關/中繼設備 WiFi整體方案 WiFi路由/AP 應用終端
- 藍牙
- 藍牙芯片 藍牙方案 藍牙網關/中繼設備 藍牙beacon 藍牙模組 藍牙接收/發射器 應用終端
- ZigBee
- ZigBee芯片 ZigBee模組 ZigBee終端 ZigBee網關/中繼設備 ZigBee數傳設備 ZigBee行業方案
- Z-wave
- Z-wave芯片 Z-wave模組 Z-wave行業方案 Z-wave網關 Z-wave終端
- UWB
- UWB芯片 UWB模組 UWB行業方案 UWB網關 UWB終端
- NFC
- NFC芯片 NFC模組 NFC標簽 NFC終端 NFC天線
- LoRa
- LoRa芯片 LoRa網關/中繼設備 LoRa模組 LoRa整體方案 LoRa終端 LoRa基站
- 其他小眾協議
- sigfox SDN-Mesh TurMass Sub-1G 芯片 模組 網關/中繼設備 整體方案類
- ZETA
- ZETA芯片 ZETA模組 ZETA網關/中繼設備 ZETA整體方案 應用終端
- 2.4G私有協議
- 2.4G芯片 2.4G模組 2.4G網關/中繼設備 2.4G整體方案 應用終端
- 平臺層
-
輔助產品與材料
應用終端/商顯
支撐技術/電池/檢測
- 電池/電源
- 鋰電池 紐扣電池 紙電池 硫電池 堿性電池 太陽能電池 錳電池 燃料電池
- 檢測設備
- 檢測設備
- 生產與耗材
- 蜂鳴器 膠水 油墨 印刷材料 金屬材料 陶瓷材料 有機材料 貼片加工
- PCB/電路板
- PCBA PCB
- 電容/電阻/電感器
- 電容 電阻 電感器
- 變壓器/互感器
- 變壓器 互感器
- 二極管/晶體管
- 二極管 晶體管
- MCU/ARM/DSP
- MCU ARM DSP
- 存儲器
- EEPROM存儲器 FLASH存儲器 EPROM存儲器 DRAM存儲器 FRAM存儲器 SRAM存儲器 待分類的存儲器
- 可編程邏輯器件
- FPGA CPLD
- 數模信號轉換器
- 模數轉換器(ADC) 數模轉換器(DAC) 混合型轉換器(ADCs+DAC) 數字電位器 模擬前端(AFE)
- 電源管理IC
- 電源管理IC
- 邏輯及時序器件
- 邏輯及時序器件
- 音頻及視頻芯片
- 音頻芯片 視頻芯片
- 運算放大器/功率放大器
- 運算放大器 功率放大器
- 晶體/振蕩器/諧振器
- 晶振 諧振器 晶體
- 連接器/電子開關
- 連接器 電子開關
- 其他
- 其他
- 濾波器
- 濾波器
- 無線充電
- 芯片 模塊 終端
-
應用終端
-
感知層
- 方案庫
- 企業庫
- 集成商
- 物聯網采購
- 物聯網招標
- 物聯網活動
- 星圖研究院
- 行業要聞
- 產業服務